













What opportunities are offered by vehicle connectivity and automation on highway?
26/09/2023

Over the past decade, the number of road vehicles connected with the outside world has been growing rapidly, in response to the need for real-time navigation data, the introduction of eCall requirements, the practicality of over-the-air software updates, and the value of usage data collection.
These improvements in vehicle connectivity are expected to benefit several fleet management systems and advanced driver-assistance systems (ADASs), by enabling the continuous transmission of information about the road environment (high-definition maps, speed limits, parking spaces, charging points, road closures, road potholes/deformation, etc.), and information about road actors (traffic light states, position of road actors, intention of road actors, etc.).
At Cranfield University, we are constantly evaluating the opportunities offered by new communication technologies to improve our transport systems. Undertaking collaborative research projects, we have investigated how connected vehicles can boost road safety by providing information to the driver beyond line-of-sight (CORAM project) and enhancing the functionalities of conditional automation (MuCCA project), and how they can help society with the optimisation of traffic flow and goods distribution.
We also have the privilege of having a proving ground with a dense installation of sensors and high-speed network coverage that can be used to investigate the benefits and the challenges of off-board perception of the environment.
Exploring vehicle connectivity with the Cranfield group design project
In 2023, our students of the MSc in Connected and Autonomous Vehicle Engineering (Automotive) were tasked with a challenging group design project, aiming to develop a system for the autonomous navigation of passenger vehicles, relying on infrastructure-to-vehicle (I2V) communication to perceive the environment.
The students were divided into teams of roughly ten members, and each team was asked to develop an infrastructure-based system to share pre-recorded information about the road layout, to detect the presence of vehicles and pedestrians, and to guide the vehicle through a target lane, commanding it to a safe stop if a car or a pedestrian was in the way.

Figure 1: Cranfield University’s proving ground, with poles instrumented to detect and process the traffic in real-time.
To tackle the project, the students were given access to a Land Rover Discovery modified to be driven from a computer, an inertial navigation system linked to a local base station (to correct for ionospheric delay and improve position accuracy), a set of roadside lidar sensors that covers our entire proving ground, as shown in figure 1, a high-definition map of the area, a dedicated network infrastructure with wireless links to the vehicle, and a selection of suitable processing units.
Each group was asked to develop some software packages to achieve the following functionalities:
- Provision of a local representation of the road layout, typically as a list of road centrelines.
- Automatic detection of vehicles and pedestrians.
- Speed planning according to the profile of the road and the position of other road actors.
- Control of the steering to maintain the vehicle along the path.
- A graphical interface to command a target speed to the driver.
- The orchestration of the above functionalities and the transmission of driving commands between the off-board computer and the on-board control unit.

Figure 2: One of the teams, with the vehicle platform used for the group design project.
The students were also instructed to follow best practice in software development, with regular cycles of formal and functional verification, taking advantage of standard tools for software lifecycle management (version control, access control, issue tracking, tasks organisation, etc.). They were encouraged to test the proposed solutions in simulation, and to validate the performance of individual subsystems before integrating them together.
Although the aim of the project was the demonstration of a proof-of-concept, it is important not to lose focus on the commercial viability of the explored technology. For this reason, each group was also asked to produce a costed business plan for a specific product developed during the project (i.e. one or more functionalities, or a system that combines some of the hardware and software used during the project), covering an assessment of the most suitable market segments, and a costed plan to develop the output of the project into the targeted commercial product.
The group design project in action
Using the high-definition map as a reference, both groups developed a simulation environment to test their algorithms. This allowed them to evaluate the proposed solution without access to the vehicle, without dealing with system failures and integration bugs, and at a speed that is only limited by the computational power available, which is much faster than real-time.

Figure 3: On the left side, a high-resolution map of Cranfield University’s proving ground. At the centre, the model of the proving ground in Carla simulator. On the right, the same environment during testing of the virtual system.
Starting with simulated outputs of the lidar sensors, the students developed detection algorithms to identify the position of the vehicles and pedestrians in the scene. These algorithms were validated against different datasets collected on the proving ground, using real sensor data.
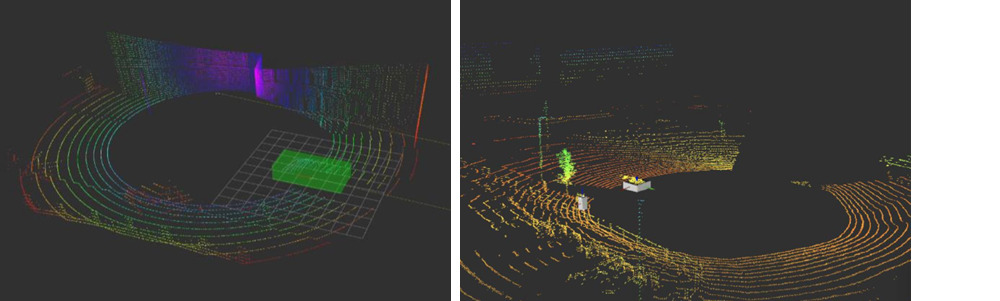
Figure 4: On the left, the simulated output of a lidar sensor with a vehicle nearby, and the output of the detection algorithm in the form of a green bounding box, around the position of the car. On the right, the real output of our lidar sensors, with a pedestrian and a car detected by white bounding boxes.
One of the teams investigated an approach to improve the localisation accuracy of the vehicle detection algorithm, by looking for matches with the 3D model of a car. This solution was necessary because the lidar sensor can often see only one side of the vehicle and, without a reference 3D model, it is only possible to calculate the position of the vehicle based on the centroid of the visible points. By fitting a 3D model to those points, however, the position estimate can be improved significantly.
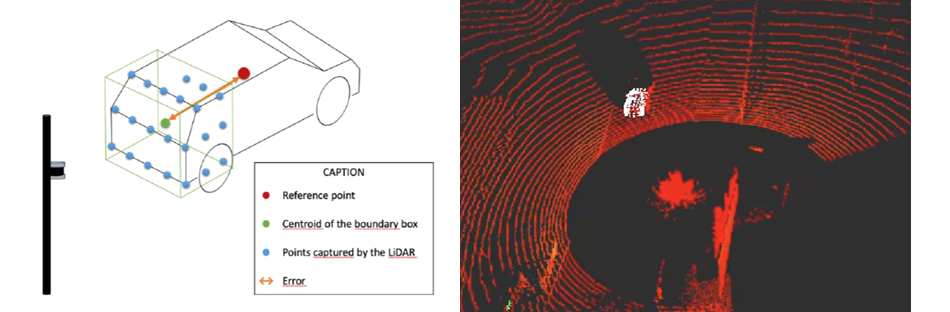
Figure 5: On the left, an illustration of the benefit of fitting a 3D model of the vehicle to the points detected by the lidar sensor, to improve the accuracy of the position estimate. On the right, the output of the fitting algorithm, in white, superposed to the output of our lidar sensors.
To be able to control our vehicle platform, the students characterised the response of the vehicle to the steering inputs, through several tests carried out on the proving ground. Thanks to our accurate inertial navigation systems, they were able to collect very precise data about the trajectories of the vehicle and use them to measure both steady-state and transient response of the steering system.
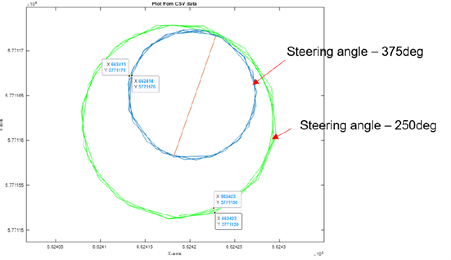
Figure 6: Characterisation of the steering response at steady state, by providing a steering target and measuring the radius of the resulting steering circles, at different speeds.
They also developed a real-time control system to steer the vehicle along a predefined route, and testing this system on the proving ground allowed them to gather precious data for the tuning of different control parameters. Figure 7 shows that they were able to achieve accurate tracking, within 0.25m, even in tight corners.
Figure 7: Path tracking performances.
Even though our vehicle can be fully automated, we kept a driver in control of the accelerator pedal during the whole project, for safety reasons. Instead of giving our students direct control of the powertrain, we asked them to send a speed request to the driver through a graphical interface. The same interface was then used to monitor the operations of the autonomous system, as shown in figure 8.
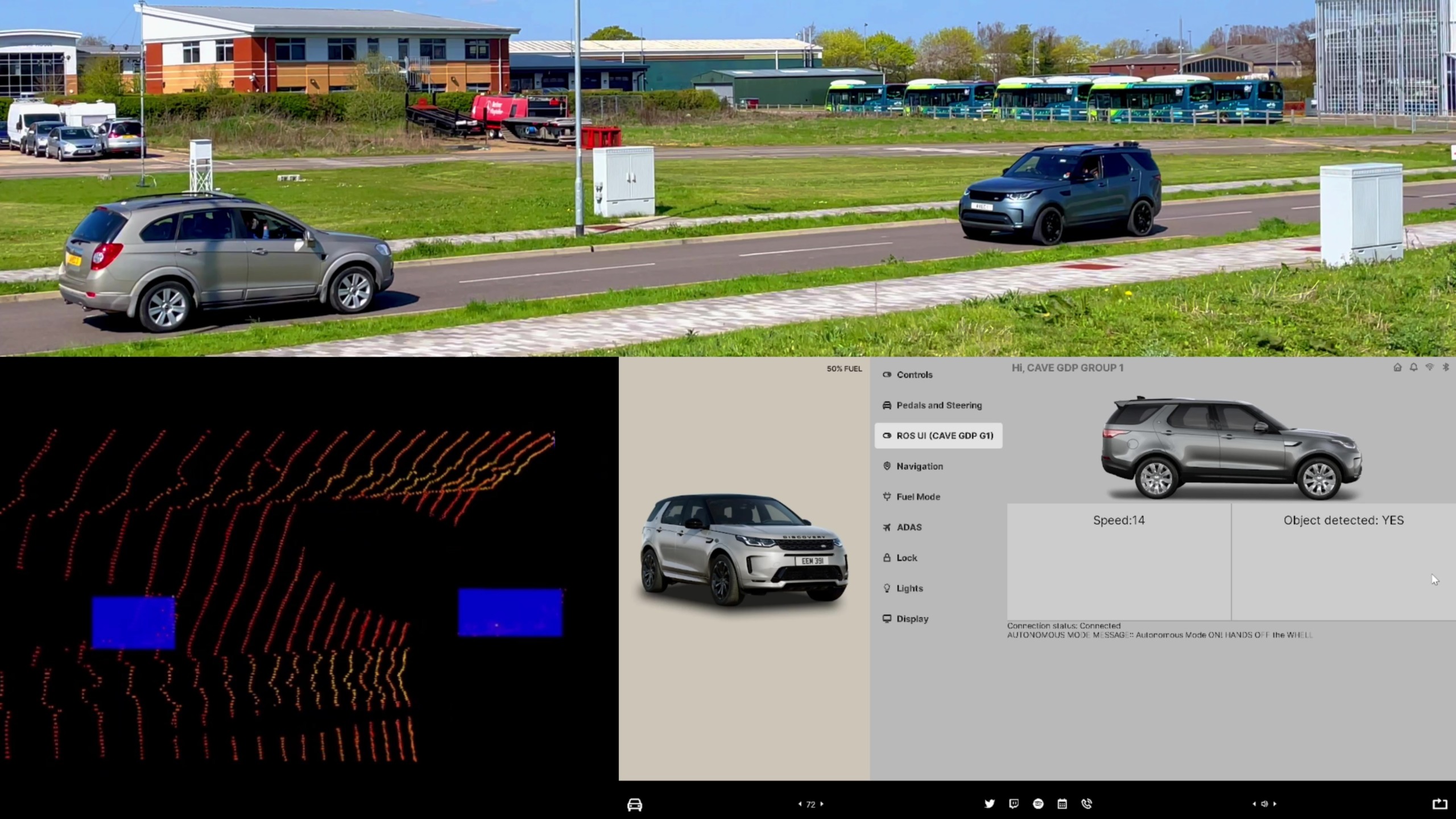
Figure 8: The graphical interface developed by our students is shown at the bottom, while the top frame shows the corresponding scene on the proving ground.
At the end of the five weeks of the projects, one of the teams was able to demonstrate the performance of the integrated solution on the proving ground, steering the vehicle along the target path, searching for obstacles in the way and, after an obstacle was detected, requesting a smooth deceleration to a safe stop.
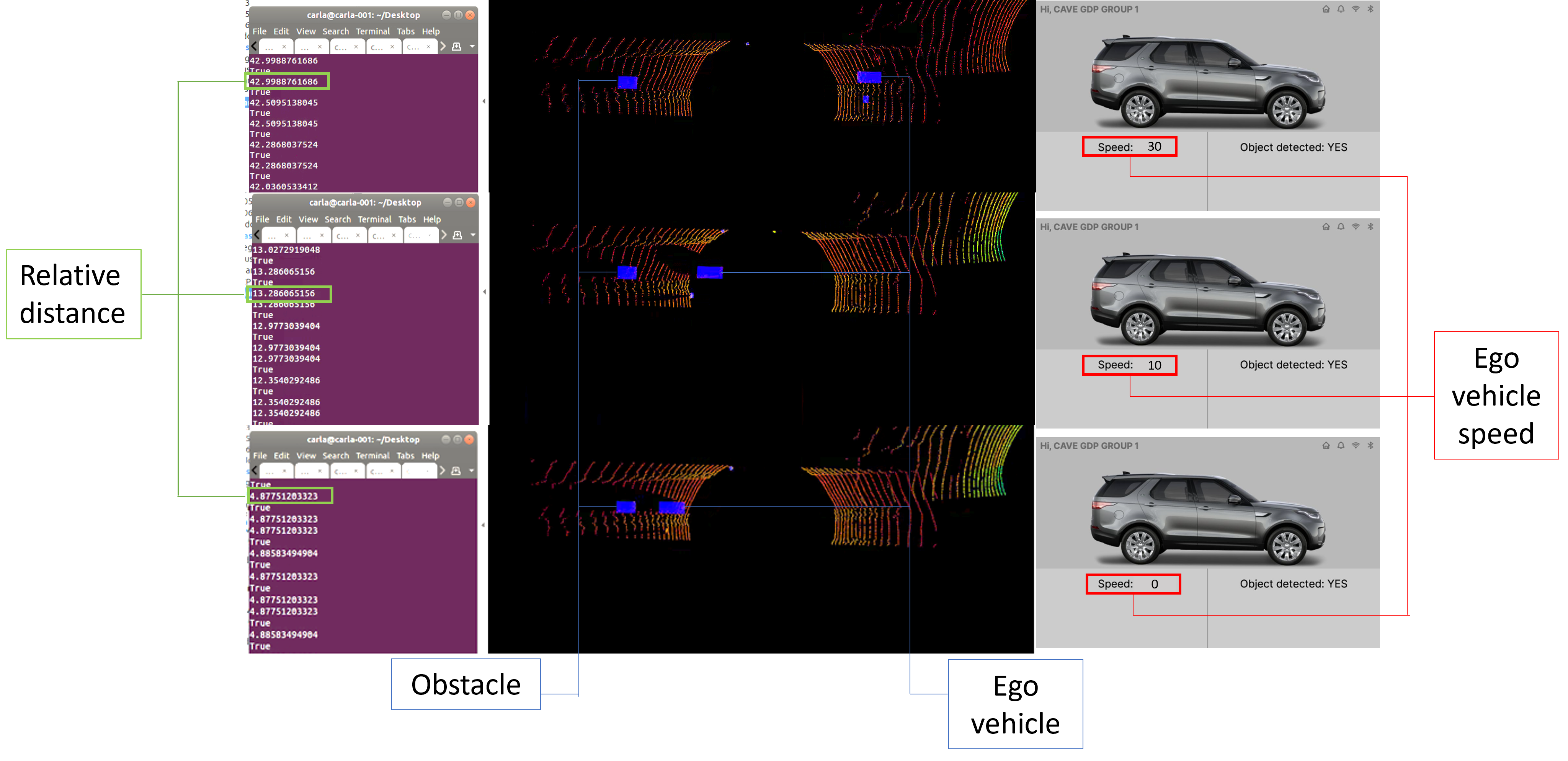
Figure 9: Three stages of the final demonstration, with the vehicle slowing down after the detection of an obstacle in the way
Creating the vehicle connectivity engineers of the future
This is just a quick overview of one of the possible applications of infrastructure-to-vehicle communication that we are exploring at Cranfield University. This project was mainly an opportunity for our students to put into practice the knowledge acquired during the master’s degree, exposing them to the challenges of real-world operations. They have largely enjoyed this adventure, despite the stress of delivering such a complex project in a very tight timeline.
They have also realised the full value of this experience during the several job interviews that focused on their involvement with the project, and many of them were able to secure an engineering role in the automotive industry before the end of the academic year.
Following our students through their careers is the best reward for everyone involved with the course, and an opportunity to strengthen our industrial links further. We are constantly adapting our projects to prepare the new generation of engineers for the future developments of connected and automated mobility, and we are looking forward to the next technical challenge.
Are you interested in finding out more about this area of research? Dr Marco Cecotti will be participating in a panel discussion in our Connected Transportation webinar on Wednesday 18 October 2023 at 12.30pm BST.

Categories & Tags:
Leave a comment on this post:
You might also like…

Introducing… Scopus
Scopus is one of the largest and most trusted academic databases, indexing millions of peer‑reviewed articles, conference papers, books, and preprints across every major discipline. Scopus contains more than 100 million records and over 30,000 ...

Do you know what makes a Technical Report special?
Writing a technical report is a little different to writing a lab report or an essay for your tutors, requiring a different approach, communication skills and format. What are technical reports? Technical reports are formal, ...

Norman C. T. Liu scholarships providing the next generation of opportunities to succeed in Air Transport Management
Cranfield University is proud to work with global industry leaders who believe in investing in the next generation of aviation professionals. One of those leaders, Norman C. T. Liu, has personally committed to supporting ...

Designing the future of space: My group design project experience at Cranfield
For three years, I worked at Tata Consultancy Services (TCS) in India. While my time in the IT sector provided me with a strong analytical foundation, my true passion had always been anchored in ...

How do I reference lecture notes… in the NLM style?
If your course material contains original content that you want to use in your work, it will need to be referenced as follows: What information do you need in the reference? Author – surname initials e.g. ...

From Nigeria to Cranfield: My journey into Future Food Sustainability
My name is Jolaosho Eniola, and I’m studying the MSc in Future Food Sustainability. I’m originally from Nigeria, and I’m passionate about food systems, food sustainability, food supply chain and creating solutions that improve ...
Comments are closed.