













How often do we use robots?
04/03/2020

How often do we use robots, will collaborative/companion robots with better Human Robot Interactions change the world?
My name is Raviteja Burugu, I am from India and I am studying an MSc in Robotics at Cranfield University. I hope you have read my previous blog about my experience of studying an MSc in Robotics. If not have a look here. In this blog I am covering an interesting aspect about robot design.
Robots are everywhere these days performing activities ranging from cleaning the floor to performing tasks on Mars, assembling small components to assembling another robot. Humans are required to control these intelligent agents/robots, thereby interactions between human and robot is very common these days.
However, what are factors that we need to consider while designing a robot that interacts with humans? How can we increase the adequacy of robots among humans? Does the size of robots intimidate humans? Does the speed of the robot have any effect on usage, or should the robot have the best technology with best user interface? I had many questions like this before joining the Robotics Masters at Cranfield University. After taking modules related to human-robot interactions (HRI), and psychology ethics and standards of robots. I was able to answers many of these questions. This led to a development of immense interest to study more about human-robot interactions and psychology aspects of robots.

Major Domains of Robotics. (I will try and cover all these topics in one blog in future!!)
The world is moving towards automation, Companies around the world are developing robots for various domains as shown in figure 1. However, not all developed robots are successful, even though their technical abilities are very high. In my opinion, human-robot interaction is one of the key factors that determine the success of the robot. HRI is multidisciplinary in nature. The figure below illustrates the vastness of the subject.
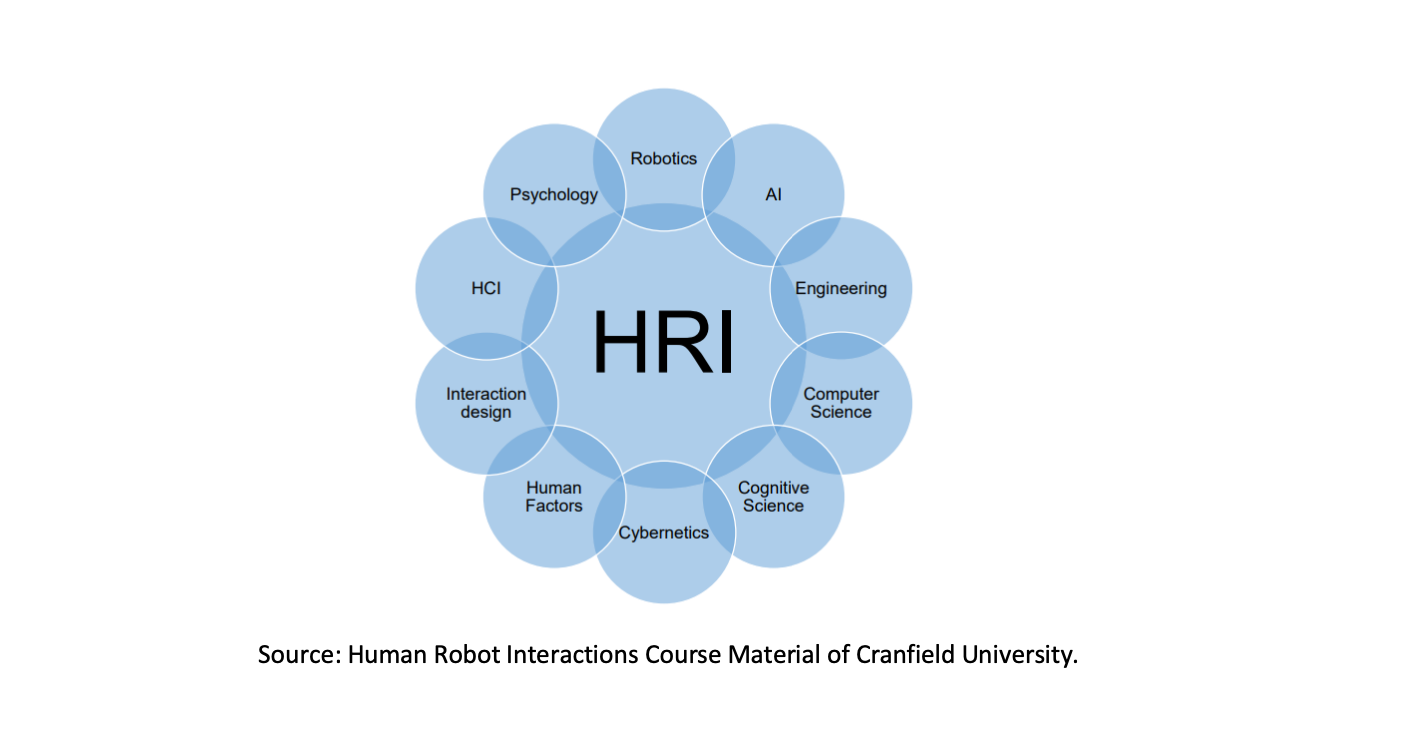
Are you thinking what HRI is? How do we use HRI to make a robot? If it is something new, what do we need to do with HRI to make a robot?
I can probably say it is a newly developing branch (since early 2000) of Robotics. It addresses the understanding, design and evaluation process of robotics systems that involve humans and robots interactions through communication. The goal of HRI is to achieve a more natural and effective interaction between humans and robots. Expectations of human, psychological parameters, ethics and standards will drive the design and development of the robot by studying the HRI.
HCI (human-computer interaction) is another field of study of how people interact with computers and to what extent computers are or are not developed for successful interaction with human beings. HCI is being studied quite extensively but the metrics and tools are not transferring completely to HRI. Having said that, HRI is different from HCI but HCI is one of the factor while developing a robot using HRI principles.
So, let us try to create a robot, say a Campus Guide Robot. The first step of the HRI system would be defining the problem.
Step-1 – Problem Statement: It is always difficult to find a way if we are in a new place. We often use Google Maps to drive from one place to another, even though we reach our destination, we will not have enough information about where to park the car or which would be the best path to reach the desired building. When it comes to universities, which are quite vast. We have seen (and not only during the first days) many students or visitors searching for a building, having a lot of questions about when, where or for how long an event or lecture plans on that particular day take place.
Step-2 – 5W 1H Analysis of the problem:
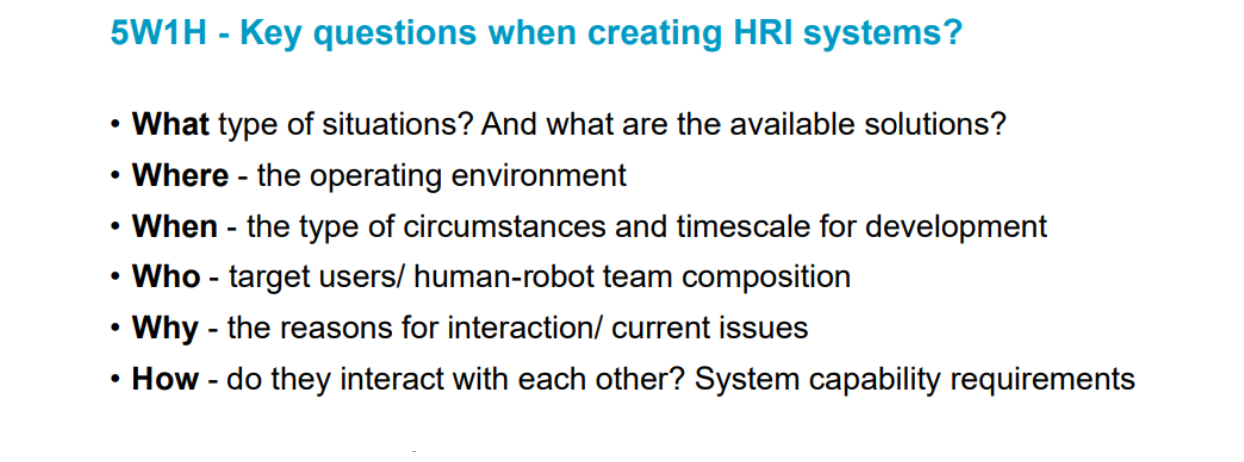

To elaborate on the analysis:
What? Our problem statement speaks about the situation; there will be many direction signs, notice boards and volunteers helping, these are the available solutions.
Where? The operating environment would be on campus, we have considered the challenges we will face during installation and the use of the robot.
When? We need to operate it 24/7, 365 days, this would be challenging, we need to think about the security, weather conditions, maintenance and safety.
Who? As the HRI systems goal is to develop a robot that can be best suitable for usage, we need to understand the range of audience, how much autonomy of robot they would be interested in.
Why? The first statement would be saving the time, making life easy and we have to understand the current challenges like using the signboards etc.
How? An interactive interface that shows paths to the destination, answers to the questions using AI.
Every question requires a lot of consideration but it gets progressively easier as more questions are answered.
Isn’t it Interesting? It is just the beginning of the processes and we have a few more steps to follow I would like to continue it in the next blog.
Thanks for reading.
Categories & Tags:
Leave a comment on this post:
You might also like…
Using AI tools for your literature review
There are a proliferation of AI tools that can help you organise your life, work and study. This post focuses on academic or scholarly tools that have been developed to enhance the literature searching process, whether for independent research, an assignment or thesis. Bear in mind that these predominantly relate to finding journal/research papers, and not technical, business or trade sources such as standards, market research, industry reports or financial data. So ...

Finding successful past Cranfield theses
It’s always a good idea to look at examples of theses before you start work on your own. You may find them valuable for reading previous research, and for looking at structure, style and methodology. ...

On‑campus or off‑campus? How Cranfield students found their home away from home
Finding the right place to live is one of the biggest decisions you’ll make as you begin your student journey. Whether you’re looking for the convenience and community of living on-campus or the independence ...

Avoiding common referencing errors
As librarians, we get to see the full spectrum of reference lists in student work —from exemplary to … well, let’s just say, works still very much in progress! We are experts in spotting mistakes ...

Using your Mendeley library after you have left Cranfield
So you have spent the whole year (or more) lovingly collecting references around the topics that matter to you and now you have a large, personalised library in Mendeley Reference Manager containing all that information. ...
Referencing the use of generative AI in your work
We recognise that Artificial Intelligence (AI) has, and will increasingly, become a part of our everyday lives and that we need to adapt to it. Hopefully you will have already seen the guidance for staff ...
Nice blog…..keep posting on